As we begin our final project, we’d like to give readers some insight into our goal for our final project, as well as our starting point.
Read More
As we begin our final project, we’d like to give readers some insight into our goal for our final project, as well as our starting point.
Read More
Two of our main learning goals for this project include: 1) having clean code and planned out system architecture and 2) learning about how an algorithm works. As such, when we planned out our schedule, we left a lot of time at the beginning of our project for planning and research.
Read More
Today, we wrapped up the first phase of our project. After assessing our learning goals, we decided that we wanted to move in a different direction in the second half of our project. In this blog post, we’ll outline the progress we’ve made so far and the steps we took to get there. We’ll also give some insight into our decision to shift gears (pun intended) in this latter half of the project, and explain what our plan is moving forward.
Read More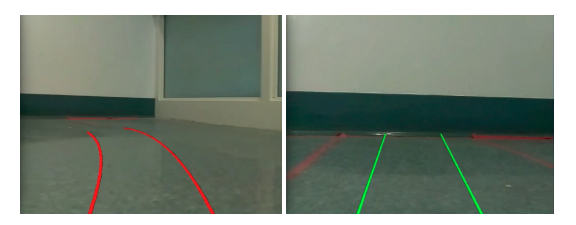
This week, we completed our implementation of the parking guideline feature. This feature was intended to complete our suite of parking assist features, adding a manual assistance option onto our parallel and perpendicular autonomous parking modes. Inspired by the parking guidelines found in cars’ rear view camera images, we implemented a computer vision system that displays the Neato’s projected path while the user is navigating manually via teleop twist.
Read More